
旋图(Hovermap)STX多平台SLAM数据采集系统
-
可配工业级无人机的测量/自主驾驶智能避撞3D激光SLAM雷达系统;
旋图STX提供激光雷达测图能力;
以无人机为圆心的球形避撞能力;
无GPS自主飞行能力,无人机与载荷达成原先不可能的项目任务。

- 技术特点
- 应用领域
- 技术参数
提升工业级无人机系统能力
无人机已经进入了众多行业市场,为行业应用提供多种意想不到的便利。但确实也存在一些应用场景上的瓶颈。阻碍其拓展某些行业应用领域。比如它无法主动探测周边全向空间的障碍物,在GPS失效的时候,它需要一个技术高超的飞手进行目视操作。hovermapSTX的智慧载荷,集成了基于3D激光雷达的自主飞行技术,令无人机系统克服了以上缺陷。这个系统,在没有GPS信号的区域也能令无人机作业系统安全飞行的同时,采集原先难以企及地点的高价值的空间信息数据。例如,在地下矿山的巷道里作业,抵近检查移动信号塔或者电力设施。
 旋图(hovemapSTX)创新的SLAM多场景应用系统
旋图(hovemapSTX)创新的SLAM多场景应用系统
旋图STX是一种交互式智慧作业系统,包含可360°旋转的3D激光雷达传感器。板载实时激光数据处理芯片。它可以挂载于指定的无人机上作为一套三维测量/检查系统,同时为无人机提供自主驾驶与避撞功能。
基于SLAM技术的3D激光测量系统

选配件1:碳纤维伸缩延长杆
高T值碳纤维定制延长杆结合旋图扫描仪总长可以达到7米,伸缩设计,携带方便安装快捷,在使用旋图扫描仪向上高举测量、向下垂吊测量,平伸进入空区过程中确保设备可以到达合适区域的同时保证人员安全。 选配件2:溜井竖井测量保护装置
选配件2:溜井竖井测量保护装置
304不锈钢编制保护笼,可以折合-展开设计,重量轻、强度高,方便携带和现场使用转换,具备透明落石保护罩,确保设备在安全的同时不影响测量效果,为溜井检测修复测量提供便利。 选配件3:地面控制点标靶
选配件3:地面控制点标靶
无人机已经进入了众多行业市场,为行业应用提供多种意想不到的便利。但确实也存在一些应用场景上的瓶颈。阻碍其拓展某些行业应用领域。比如它无法主动探测周边全向空间的障碍物,在GPS失效的时候,它需要一个技术高超的飞手进行目视操作。hovermapSTX的智慧载荷,集成了基于3D激光雷达的自主飞行技术,令无人机系统克服了以上缺陷。这个系统,在没有GPS信号的区域也能令无人机作业系统安全飞行的同时,采集原先难以企及地点的高价值的空间信息数据。例如,在地下矿山的巷道里作业,抵近检查移动信号塔或者电力设施。
旋图STX是一种交互式智慧作业系统,包含可360°旋转的3D激光雷达传感器。板载实时激光数据处理芯片。它可以挂载于指定的无人机上作为一套三维测量/检查系统,同时为无人机提供自主驾驶与避撞功能。
旋图STX基于“并发定位于成图”(SLAM)算法,替代复杂且相对昂贵的GPS/惯导INS硬件组合导航技术路线,这就使旋图STX具备在无GPS信号环境实时三维成图能力,例如室内环境,地下作业,或者在遮蔽GPS信号的区域获取连续且高质量三维点云。用户可以在现场获取三维完工图,料堆体积,计算土方量,或地下矿山采场三维模型,多次测量进行比较,可以获得被测对象三维变化量。旋图STX不仅可以挂载于无人机执行三维测量任务,还可以单独手持或者安装于车辆上进行作业。1.6kg的重量可以使矿山测量人员真正实现无负担作业。杰出的SLAM算法不再需要脚架、对中、整平、搬站这些繁琐的流程,实现单人手持设备连续测量。绝对坐标可以后期在软件上添加拟合。尤其是旋图STX提供的板载数据解算功能,把内业处理过程转换到设备内部,结束测量以后将U盘与旋图机身连接,即可导出已经完成解算的点云数据。解放体力的同时,也令内业工作内容降到更低。
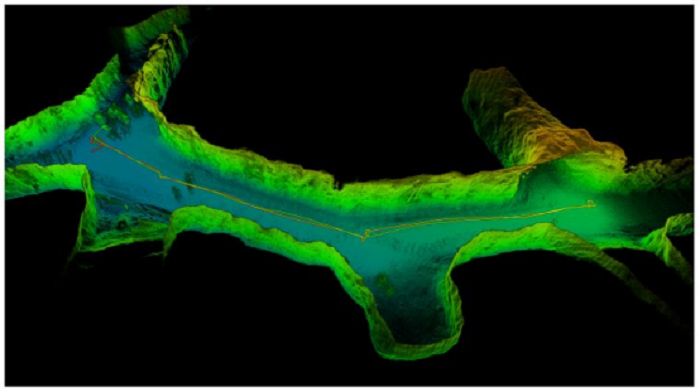
地下巷道三维图
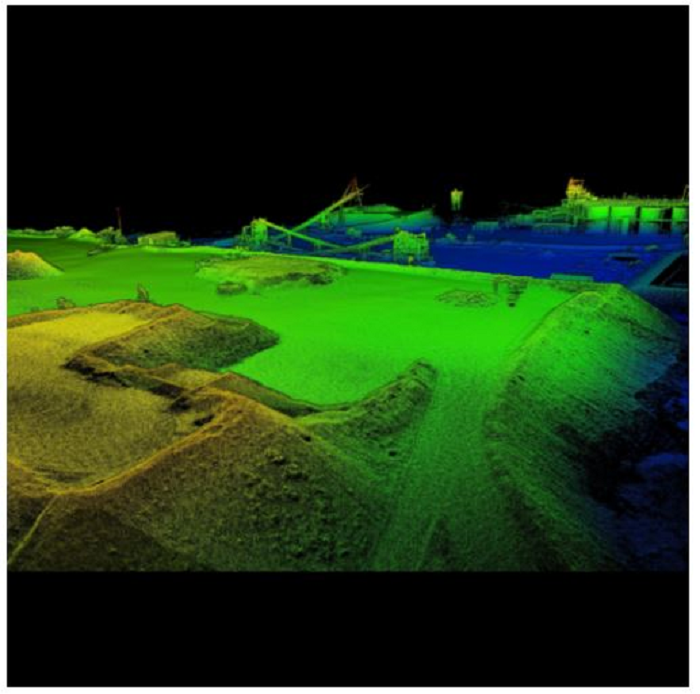
排土场
露天矿验收测量
选配件1:碳纤维伸缩延长杆
高T值碳纤维定制延长杆结合旋图扫描仪总长可以达到7米,伸缩设计,携带方便安装快捷,在使用旋图扫描仪向上高举测量、向下垂吊测量,平伸进入空区过程中确保设备可以到达合适区域的同时保证人员安全。
304不锈钢编制保护笼,可以折合-展开设计,重量轻、强度高,方便携带和现场使用转换,具备透明落石保护罩,确保设备在安全的同时不影响测量效果,为溜井检测修复测量提供便利。
应用领域:
巷道采场数字化
出矿量计算
溜井放矿口检测
巷道隧道支护检测
充填效果检核
地采矿采空区测量
露天矿验收测量
地质构造记录分析
巷道采场数字化
出矿量计算
溜井放矿口检测
巷道隧道支护检测
充填效果检核
地采矿采空区测量
露天矿验收测量
地质构造记录分析
技术参数:
雷达距离:0.5-300米
测距精度:±15mm通常环境
±10mm室内或地下环境
±5mm检测精度
视场角:360°× 290°
激光雷达速度:单回波模式:达640,000点/秒
多回波模式(3次):达1,920,000点/秒
数据输出:全分辨率点云,抽稀点云,轨道
点云格式:.las,.laz,.ply,.dxf,.E57
点云属性:强度值、距离、时间、回波数据(最强和最后)、环数、RGB/真彩色(可选)
内存:512G
工作温度:-10—+45℃
IP等级:IP65
重量:1.57kg
通讯:专用端口、USB、WiFi
雷达距离:0.5-300米
测距精度:±15mm通常环境
±10mm室内或地下环境
±5mm检测精度
视场角:360°× 290°
激光雷达速度:单回波模式:达640,000点/秒
多回波模式(3次):达1,920,000点/秒
数据输出:全分辨率点云,抽稀点云,轨道
点云格式:.las,.laz,.ply,.dxf,.E57
点云属性:强度值、距离、时间、回波数据(最强和最后)、环数、RGB/真彩色(可选)
内存:512G
工作温度:-10—+45℃
IP等级:IP65
重量:1.57kg
通讯:专用端口、USB、WiFi
 微信公众号
微信公众号